|
|
L'historique de 2626
Cette année est notre 8e année de compétition. Tout a commencé lors de l'année scolaire 2006-2007, lorsque Monsieur Laurent Beaudoin de Bombardier est venu au Séminaire de Sherbrooke pour nous inviter à participer à une compétition de robotique très connue et rependue aux États-Unis et dans le Canada anglais, FRC pour FIRST Robotics Competition. Un petit groupe d'élèves et d'enseignants est allé à Boston afin d’assister à une compétition FRC. Il en est ressortit que l’année suivante, une nouvelle équipe participera à la grande compétition FIRST, ce sera l’équipe 2626 Evolution.
Donc, l’équipe Evolution 2626 en est à sa septième année de compétition. Depuis 2008, l’équipe performe en s’améliorant d’année en année. Voici un petit historique des défis. Notez que les vidéos sont en anglais seulement.
Donc, l’équipe Evolution 2626 en est à sa septième année de compétition. Depuis 2008, l’équipe performe en s’améliorant d’année en année. Voici un petit historique des défis. Notez que les vidéos sont en anglais seulement.
|
2016: Stronghold
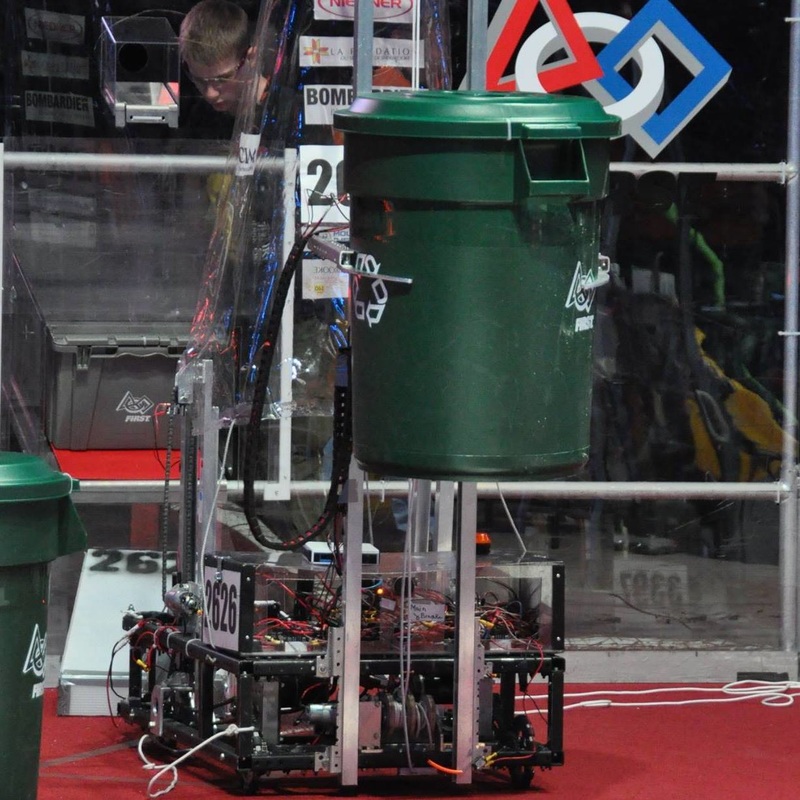
2015: Recyclage express
Le défit de cette année consiste à faire des piles de bacs sur 2 bosses situées sur le terrain. Dans l'arène, il y a plusieurs bacs et chaque bac vaut 2 points s'il est placé sur une bosse ou dans une pile. On doit empiler les bacs un par-dessus l'autre. Sur le dessus, on peut mettre une poubelle qui, elle , peut avoir une nouille. La poubelle ajoute 2 points à chaque bac, donc chaque bac vaut 4 points. Il est possible de mettre un déchet (une nouille de piscine) dans une poubelle ce qui ajoute 6 points à la pile. Il y a un maximum de 6 bacs par pile. Le terrain de jeu est divisé en deux zones principales: la bleue et la rouge. Dans chaque zone qu'on appelle alliance, il y a trois équipes. Chaque zone est divisée en 2 zones: la zone auto et la "landfill zone". Il n'y a pas d'interaction avec les autres robots sauf pour les "coopétition stack" et groupements. Le but est de faire des groupements ou des piles avec tous les bacs jaunes, les-nôtres et ceux de l'autre équipe. Les équipes de chaque alliances doivent s'entraider. Dans le mode auto, on as 3 bacs jaunes et 3 poubelles. Il faut les amener dans la zone auto. On peut faire en sorte que le robot aille dans la zone auto ou qu'il ne bouge pas. Les points sont seulement attribués à la fin du match sauf pour les points en mode autonome ou pour les "stack/groupement" de coopétition. 2014: Aerial Assit
Le défi de cette année consiste à faire des passes entre les robots de son alliance avec un ballon d’exercice. Plus nombreuses sont les passes (assists), plus de points peuvent être marqués. À chaque extrémité du terrain, il y a des buts de 10 points en hauteur et des buts de 1 point dans les coins inférieurs. Le premier assist ne donne aucun point supplémentaire, le deuxième donne 10 points supplémentaires et le troisième en donne 30 points. De plus, au centre du terrain, une poutre est située à environ 6 pieds du sol. Si un lancé est effectué par dessus cette poutre, un 10 points supplémentaire sera attribué à l'alliance, et si, en plus, un robot attrape ce lancé, un autre 10 points sera ajouté au score de l'équipe. Tous ces points bonus sont attribués seulement lorsqu'un but est marqué avec le ballon. Voir la vidéo du défi 2013: Ultimate Ascent
Cette fois-ci, le robot devait jouer au Frisbee. Pour faire des points , les robots doivent lancer des frisbee dans les buts situés aux extrémités du terrain ou sur le dessus d'une pyramide. Les points étaient répartis ainsi : 3 points pour le but le plus haut du terrain, 2 points pour ceux de la hauteur intermédiaire, 1 point pour le but le plus bas et 5 points pour le but sur le dessus de la pyramide. De plus, si les frisbees rentrent dans les buts durant la période autonome, les points seront doublés. La surface de jeu est séparée en deux et dans chaque partie, il y a une pyramide à 3 étages. À partir des 30 dernières secondes, le robot peut escalader la pyramide et les points sont accordés en fonction de la hauteur atteinte soit 10 points pour le premier niveau, 20 points pour le deuxième niveau et 30 points pour troisième niveau. Voir la vidéo du défi 2012: Rebound Rumble
Pour cette année, le robot doit jouer au basket-ball. Pour marquer des points, les robots doivent lancer des ballons dans les quatre paniers de basket-ball situés aux extrémités du terrain, disposés à trois hauteurs différentes. Les points sont répartis de la façon suivante: 3 points dans le panier du haut, 2 points dans les paniers du milieux et 1 point dans le panier du bas. 3 points s’ajoutent à chaque ballons qui entrent dans le panier durant le mode autonome. Cette année, une modification est apportée au mode autonome: nous avons la possibilité d’utiliser la Kinect de Xbox pour diriger le robot. Seulement une équipe de l’alliance a la possibilité de diriger son robot avec la Kinect. La surface de jeu est divisée en deux par une barre de métal appelée barrière. Sur cette barrière sont installés trois ponts à trois positions possibles. Les robots ont la possibilité de traverser le terrain soit en passant sur la barrière, soit en passant sur le pont. Durant les 15 dernières secondes du match, les robots ont la chance de gagner des points supplémentaires s’ils réussissent à se tenir en équilibre deux ou trois robots à la fois. Des points de coopérations sont aussi possibles si deux robots d’alliance adverse se balance sur le pont du milieux. Voir la vidéo du défi 2011: Logomotion
Le robot devait prendre des tubes ayant les formes du logo de FIRST, soit un triangle, un cercle et un carré, pour les accrocher et refaire le logo de FIRST. Les pilotes avaient le choix entre trois hauteurs différentes pour accrocher les tubes. Lorsqu’une forme était accrochée au troisième niveau, l’équipe remportait 3 points. Lorsqu’un tube était accroché au deuxième niveau, l’équipe remportait 2 points et lorsqu’ils l’accrochaient au premier niveau, il remportait seulement 1 point. Quand l’équipe complétait un logo, il doublait leur point. À la fin du jeu, le robot devait déployer un minibot sur une tour. L’équipe que son minibot arrivait en premier remportait 30 points, celle que son minibot en deuxième, 20 points, celle qu’il arrivait en troisième 15 points, et le dernier, 10 points. Voir la vidéo du défi 2010 : Breakaway
Le robot devait lancer des ballons de soccer dans un but pour faire le maximum de points. La zone de jeu était séparée en trois partie par des bosses que les robots pouvaient surmonter. Les robots devaient lancer les ballons sans les transporter. Ils devaient aussi protéger leurs buts de l’autre équipe, qui étaient chacune composées de trois robots. Si, en traversant la bosse, un robot se renversait, un autre robot de son équipe pouvait aller le retourner. À la fin du match, les robots pouvaient aller se suspendre sur des structures, situées au milieux des bosses. Les points étaient donnés de la façon suivante: 1 point lorsqu’un ballon entrait dans le but adverse, 2 points lorsque le robot réussissait à se suspendre sur la structure, et 3 points lorsqu’un robot se suspendait sur robot déjà suspendu. Voir la vidéo du défi 2009 : Lunacy
Cette année, la compétition se jouait sur une surface glissante, qui représentait la Lune. Les robots devaient avoir des roues qui adhéraient à cette surface tout en appliquant le moins de pression possible. À l’arrière de chaque robot, une remorque était attachée. Le but du jeu était de lancer différent type de balle (Empty Cell, Moon Rock et Super Cell) dans la remorque d’un robot de l’équipe adverse. Les participants pouvaient aussi lancer des balles dans les remorques. Au début du jeu, les robots partaient avec 7 Moon Rock en leur possession dans un panier situé sur le robot. Les robots pouvaient ramasser les balles qui n’étaient pas entrées dans les remorques pour les envoyer à leurs coéquipiers. Ils pouvaient aussi être équiper d’un outil pour qu’un membre de l’équipe place un ballon dessus et que le robot aille le déposer dans une remorque adverse. Durant le jeu, les balles supplémentaires de types Empty Cell et Moon Rock pouvaient être échangées contre les balles Super Cell. Durant les 20 dernières secondes du jeu, les membres de l’équipe et/ou les robots pouvaient lancer ces balles dans les remorques pour gagner des points supplémentaires. Les balles Moon Rock et Empty Cell valaient 2 points chaque et les balles Super Cell valaient 15 points chaque. Voir la vidéo du défi 2008 : Overdrive
Les robots devaient faire le plus de tour de la surface de jeu possible en déplaçant de gros ballons. Les robots commençaient sur le mur du fond (l’alliance des rouges ensemble et l’alliance des bleus ensemble) du jeu. La surface de jeu était séparée en deux sur le sens de la longueur par un pont, appelé Overpass, de six pieds et demi de haut. Chaque alliance avait deux ballons qui étaient positionnés de façon aléatoire au début de chaque match. Les robots devaient être construit assez robuste pour être capable de résister au chute de ballon possible. Durant le mode autonome (hybrid mode), si le robot avait été capable de déplacer un ballon, sont alliance récoltait des point bonis. Lorsque les pilotes prenaient le contrôle, ils devaient déplacer les ballons tout autour de la surface de jeu, soit en les poussant, soit en les prenant. Chaque ballon qui était passé sous le pont donnait 2 points. Par contre, chaque ballon passé au-dessus du pont donnait 8 points. 20 points bonis pouvaient être accumulé si, à la fin du match, le robot réussissait à replacer le ballon sur le dessus du pont et qu’il restait en position, car les autres robots pouvaient le faire tomber. Voir la vidéo du défi |


2014 : Aerial Assist
Résultats :


2013 : Ultimate Ascent
Résultats :

2012 : Rebound Rumble
Résultats par évènements :

2011 : Logomotion
Résultats:


2010 : Breakaway
Résultats :


2009 : Lunacy
Résultats :


2008 : Overdrive
Résultats :
|